Después de estar más de un año apuntando mi antena de rebote lunar (RL ó EME) manualmente, me dí cuenta de que aquella situación era insostenible en los meses de invierno y aunque solía corregir la posición cada 15 minutos, siempre me tocaba salir en los momentos más críticos de un QSO, amén del frío que pasaba en las interminables noches de los concursos. Precisaba un sistema que fuese sencillo, económico, de fácil ajuste y sobre todo, que ofreciese una precisión mejor que un par de grados para tener así las antenas trabajando a tope de su rendimiento. Recopilando información en Internet sobre componentes y otras ideas, he preparado este sencillo artilugio que seguro os será útil a más de uno.
Nuestro circuito consta de cuatro partes bien diferenciadas: fuente de alimentación, circuito de mando, puente de medida y conversión A/D. La fuente de alimentación es tan sencilla que no necesita grandes comentarios. El secundario de TR1 se rectifica con un puente de diodos, después se filtra con C13 y se estabiliza en un integrado 7805 para alimentar el resto de la circuitería de medición.

A su vez, la tensión de salida de TR2 se rectifica y filtra de la misma forma y se envía por medio de conmutadores inversores a los motores de CC de azimuth y elevación. En el caso de que los motores fuesen de CA cada uno deberá adoptar sus soluciones.
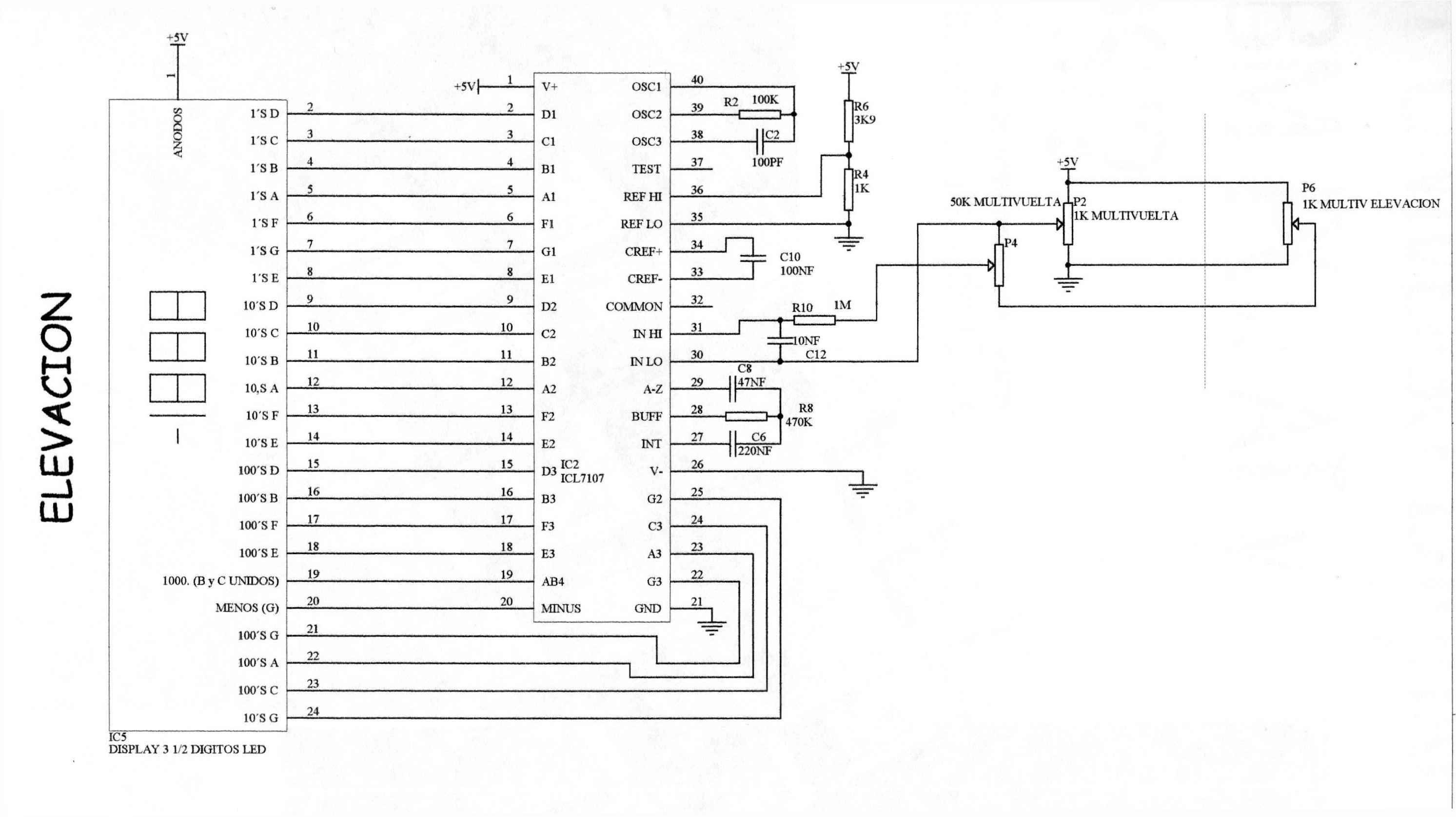
La parte más interesante de nuestro circuito es la sección de medida. Este circuito está duplicado pues es idéntico para la indicación de dirección y de elevación. El puente lo componen tres potenciómetros multivuelta P1, P3 y P5. El potenciómetro P5 va situado en la antena y es del tipo 10 vueltas Burns o similar. P1 y P3 son también multivuelta pero para montaje en circuito impreso. El acoplamiento de este potenciómetro a la antena lo dejo a elección de cada uno, pero es una cuestión de gran importancia, pues de ello depende la precisión de las medidas. Para elevación lo más usual y sencillo es colgar del potenciómetro un plomo pesado de pesca. Para la indicación de dirección se puede intentar algún sistema con engranajes, poleas o cintas.
Veamos como funciona: supongamos que P1 y P5 están justamente en su medio recorrido y la antena apunta exactamente al norte. La tensión entre los cursores de ambos potenciómetros y masa es de 2.5V, la mitad de la tensión de alimentación. La tensión entre un extremo de P3 y su cursor es pues de 0V, que corresponde con la indicación de 0 grados. Si movemos la antena una vuelta completa, P5 cambia de posición y por tanto la tensión entre cursor y masa subirá a 3 V por ejemplo. Que sean exactamente 3 V no nos importa, pues dependiendo del tipo de transmisión empleado y del diámetro de las poleas puede haber diferentes relaciones de multiplicación. Entonces, la caída de tensión entre extremos de P3 será de 500mV. Regulando P3 podremos hacer que nuestro indicador marque los 360 grados deseados.
El corazón de nuestro circuito de medición es el integrado ICL 7107 de Harris. Se puede obtener una hoja de características completa de este integrado en http://www.harris.com. Se trata de un convertidor analógico digital con capacidad para manejar un display de LEDs de 3-1/2 dígitos, es decir, tres dígitos completos más otro dígito que sólo indica 1 o nada además del signo negativo. Posee dos entradas diferenciales, una es la señal a medir (IN HI e IN LO) y la otra es la de referencia (REF HI y REF LO). La visualización de salida sigue la fórmula siguiente:
Vin
INDICACIÓN= 1000x _____
Vref
En nuestro caso, el voltaje de referencia lo determinan las resistencias R5 y R3, siendo de aproximadamente 1V, por lo que una entrada de por ejemplo 0.5V daría una indicación de 500 en el display. Si el lector tiene ganas de perder un buen rato echando unas cuentas, analizando el circuito por cualquier método como puede ser el de análisis por mallas, se demuestra que la indicación no depende del voltaje de alimentación, pues en este caso el puente y la referencia se alimentan de la misma fuente de 5V. Ello es una gran ventaja, pues pequeños cambios en la salida del regulador de tensión por causa de su calentamiento no afectarán a la precisión de las medidas. El funcionamiento interno del integrado es complejo, y la determinación del resto de los componentes asociados se indica en las hojas de características, habiéndose escogido los más adecuados a esta aplicación particular.

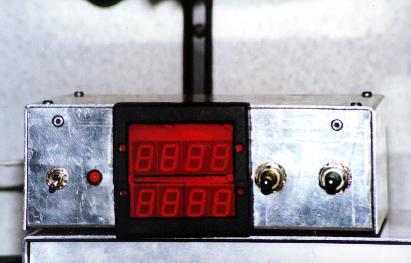
El cableado hacia los dígitos no presenta problemas especiales. Por ejemplo, la salida D1 significa segmento d del dígito "unidades". A2 es el segmento a del dígito "decenas". C3 es el segmento c del dígito "centenas". La salida marcada como AB4 se conectará a los segmentos b y c del dígito de los "miles". La salida MINUS se conecta al segmento g del mismo dígito y se encenderá en el caso de que giremos la antena más allá del norte.
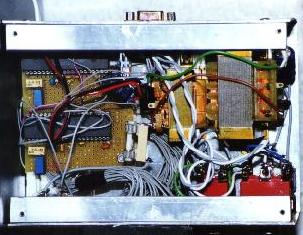
Aunque lo más apropiado hubiese sido diseñar unas placas, utilicé placas pretaladradas para la circuitería de los integrados y regulador, construyendo las fuentes de alimentación alambradas directamente en los terminales de salida de los transformadores. Los visualizadores se construyeron en placas aparte con 8 displays LED rojos de 7 segmentos y se cubrieron con una plaquita de metacrilato del mismo color. El cableado desde los integrados hasta los visualizadores es un poco pesado y lo realicé deshilachando cablecillo del tipo cinta de 40 conductores usado para conectar discos duros. Es importante usar este cable pues al ser muy fino ocupa poco espacio siendo necesario llevar casi medio centenar de ellos.
Es preciso colocar un disipador de calor al 7805 o en su defecto atornillarlo a la caja, pues se disipa en él bastante potencia y se superarían sus características máximas de temperatura. La conexión al exterior la hice a través de un conector tipo DB-9 utilizando 8 patillas:
1. Motor AZ 2. Motor AZ 3. Motor EL 4. Motor EL 5. +5V 6. Masa 7. Cursor potenciómetro AZ 8. Cursor potenciómetro EL
Es importante desacoplar las entradas 5, 7 y 8 a masa con condensadores de 1nF para evitar problemas de RF.
Dirección: Colocar la antena apuntando al norte. Ajustar P1, P3 y P5 a medio recorrido (más o menos, no es crítico). Ajustar P1 con cuidado hasta obtener una lectura de 000. Dar una vuelta completa a la antena hasta llegar de nuevo al norte. Ajustar P3 para una lectura de 360 grados. Si tenemos indicación negativa basta cambiar el cableado de los extremos de P5. Volver a posicionar la antena hacia el norte y comprobar que la indicación es de 000. En el caso de que no pudiésemos llegar a la indicación de 360 grados moviendo P3, se puede disminuir la tensión de referencia reduciendo el valor de R3.
Elevación: Colocar la antena horizontal. Ajustar P2, P4 y P6 a medio recorrido (más o menos, no es crítico). Ajustar P6 con cuidado hasta obtener una lectura de 000. Elevar la antena al zenit (90 grados). Ajustar P4 para una lectura de 90 grados. Si tenemos indicación negativa basta cambiar el cableado de los extremos de P6. Volver a posicionar la antena horizontal y comprobar que la indicación es de 000. En el caso de que no pudiésemos llegar a la indicación de 90 grados moviendo P4, se puede disminuir la tensión de referencia reduciendo el valor de R4.
Por muy poco dinero disponemos de un sistema muy preciso para posicionar nuestra antena, mucho más preciso y barato que lo que se encuentra ya hecho en los comercios del ramo. Lo mejor, hemos aprendido y pasado unos buenos ratos en compañía del soldador.
Si tenéis cualquier duda podéis escribir a mi dirección habitual o bien a mi correo electrónico:
Copyright (c) 2006 Ramiro Aceves . Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free Documentation License".